Versio 2022.45.15
Julkaistu 8. huhtikuuta 2023
Julkaisukartta
Nykyinen maailmanlaajuinen käyttöönotto
Jakeluaste
Laivaston laajuinen käyttöönotto päiväkohtaisesti
Julkaisutiedot
FSD Beta v11.3.6
Sisältyy kohtaan 2022.45.15
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
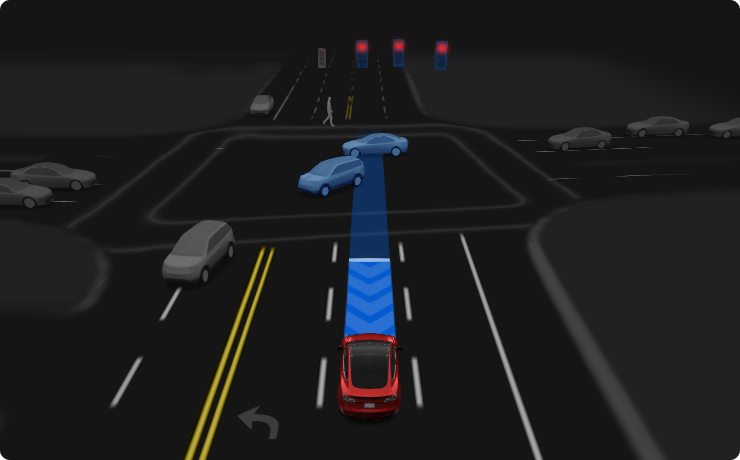
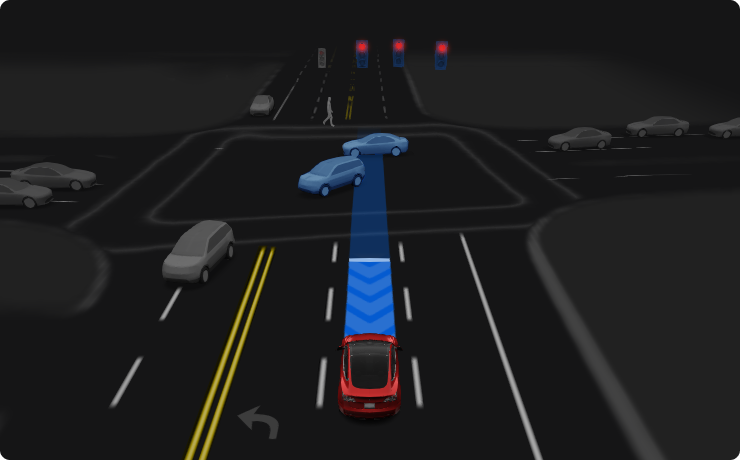
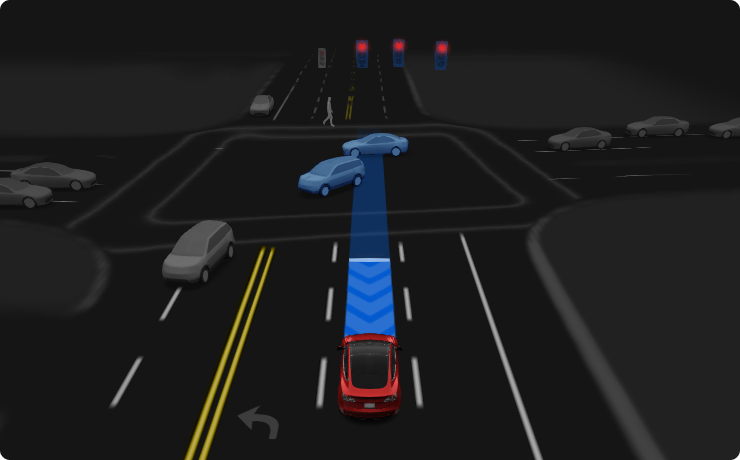
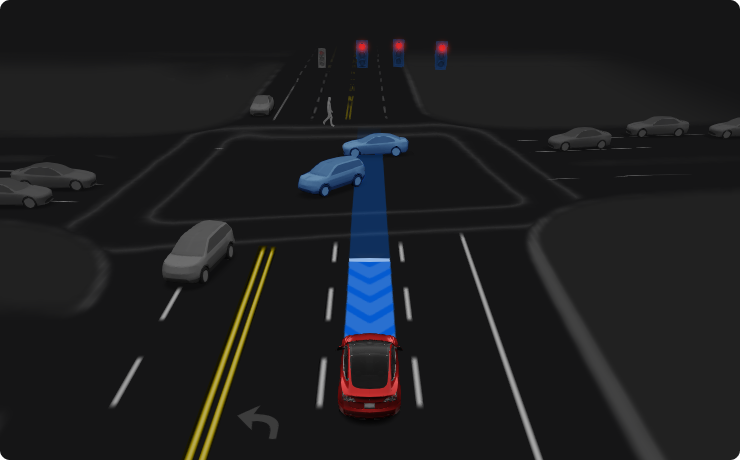
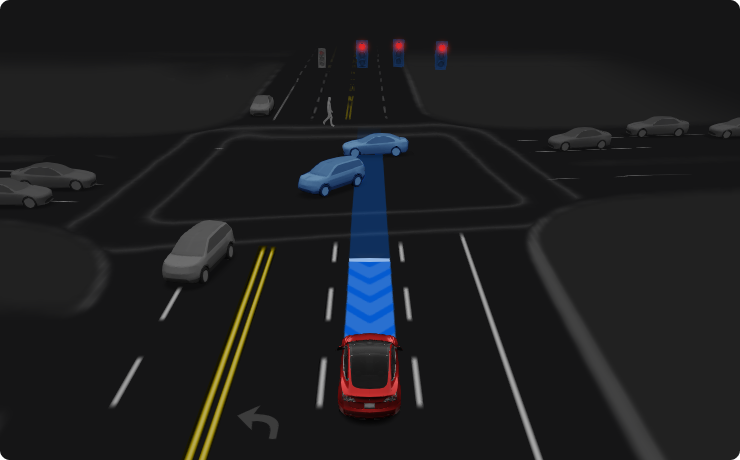
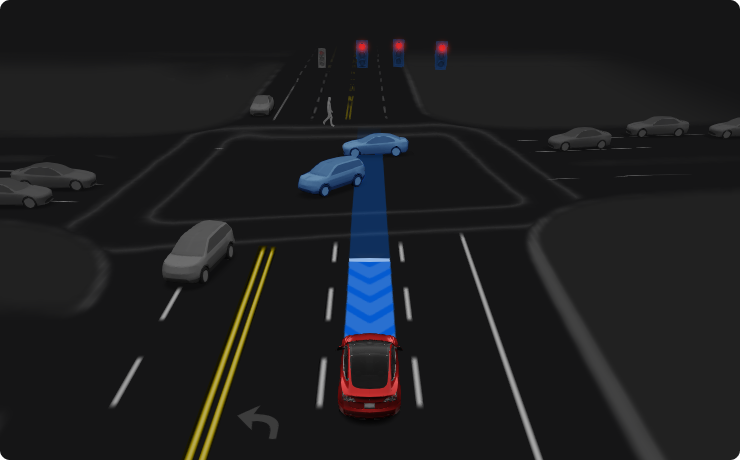
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
- Automaattisen kuolleen kulman kameran asentoa on säädetty, kun FSD Beta on aktiivinen, jotta autopilotin visualisointi asetetaan etusijalle. Vedä kameraa tallentaaksesi mukautettuja sijainteja.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.15
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.
FSD Beta v11.3.5
Sisältyy kohtaan 2022.45.14
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
- Automaattisen kuolleen kulman kameran asentoa on säädetty, kun FSD Beta on aktiivinen, jotta autopilotin visualisointi asetetaan etusijalle. Vedä kameraa tallentaaksesi mukautettuja sijainteja.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.14
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.
FSD Beta v11.3.4
Sisältyy kohtaan 2022.45.13
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
- Automaattisen kuolleen kulman kameran asentoa on säädetty, kun FSD Beta on aktiivinen, jotta autopilotin visualisointi asetetaan etusijalle. Vedä kameraa tallentaaksesi mukautettuja sijainteja.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.13
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.
FSD Beta v11.3.3
Sisältyy kohtaan 2022.45.12
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
- Automaattisen kuolleen kulman kameran asentoa on säädetty, kun FSD Beta on aktiivinen, jotta autopilotin visualisointi asetetaan etusijalle. Vedä kameraa tallentaaksesi mukautettuja sijainteja.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.12
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.
FSD Beta v11.3.2
Sisältyy kohtaan 2022.45.11
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
- Automaattisen kuolleen kulman kameran asentoa on säädetty, kun FSD Beta on aktiivinen, jotta autopilotin visualisointi asetetaan etusijalle. Vedä kameraa tallentaaksesi mukautettuja sijainteja.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.11
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.
FSD Beta v11.3.1
Sisältyy kohtaan 2022.45.10
- FSD Beta on otettu käyttöön moottoritiellä. Tämä yhtenäistää visio- ja suunnittelupinon maantiellä ja sen ulkopuolella ja korvaa yli neljä vuotta vanhan maantiepinon. Vanha moottoritien pino perustuu edelleen useisiin yhden kameran ja yhden kuvan verkkoihin, ja se on suunniteltu käsittelemään yksinkertaisia kaistakohtaisia manöövereitä. FSD Betan usean kameran videoverkot ja seuraavan sukupolven suunnittelija, joka mahdollistaa monimutkaisemman agenttien vuorovaikutuksen, jossa ei ole niin paljon riippuvuutta kaistoista, mahdollistavat älykkäämmän käyttäytymisen, sujuvamman ohjauksen ja paremman päätöksenteon.
- Parannettiin läheltä piti -tilanteiden muistamista 15 %, erityisesti suurten kuorma-autojen ja korkean hyörinänopeuden skenaarioiden osalta, kun autokannasta poimittiin 30 000 automaattista leikettä. Lisäksi laajennettiin ja viritettiin erityistä nopeudenvalvontaa sisäänajokohteita varten.
- Parannettiin egon asemaa leveillä kaistoilla ohjaamalla tulevan käännöksen suuntaan, jotta muut autot voivat väistää egon.
- Parannettu ajokäsittely tilanteissa, joissa on suuri kaarevuus tai suuria kuorma-autoja, siirtymällä kaistalle ja säilyttämällä turvalliset etäisyydet muihin tiellä oleviin ajoneuvoihin ja lisäämällä mukavuutta.
- Parannettu käyttäytymistä reitin tukkeutumisen aiheuttamien kaistanvaihtojen yhteydessä tiheässä liikenteessä. Ego säilyttää nyt enemmän etumatkaa tukkeutuneilla kaistoilla suojautuakseen mahdollisilta aukoilta tiheässä liikenteessä.
- Parempi kaistanvaihto tiheässä liikenteessä mahdollistamalla suurempi kiihtyvyys tasausvaiheessa. Tämä johtaa luonnollisempaan välyksen valintaan, jotta viereisen kaistan ajoneuvot voidaan ohittaa hyvin lähellä egoa.
- Kääntyminen on sujuvampaa parantamalla kaistojen, viivojen ja tien reunojen havaitsemisen yhdenmukaisuutta. Tämä saavutettiin integroimalla kaistanohjausmoduulin uusin versio tienreuna- ja viivaverkkoon.
- Parempi tarkkuus muiden ajoneuvojen liikkuvan semantiikan havaitsemisessa. Parannettiin tarkkuutta 23 % tapauksissa, joissa muut ajoneuvot siirtyvät ajamaan, ja vähennettiin virhettä 12 % tapauksissa, joissa Autopilot havaitsee johtavan ajoneuvon virheellisesti pysäköidyksi. Nämä saavutettiin lisäämällä videokontekstia verkossa, lisäämällä enemmän tietoa näistä skenaarioista ja lisäämällä häviörangaistusta ohjauksen kannalta merkityksellisten ajoneuvojen osalta.
- Laajennettu maksimaalisen lentoradan optimointihorisontti, jonka ansiosta ohjaus on tasaisempaa suurten kaarevuuksien teillä ja kaukana olevilla ajoneuvoilla, kun ajetaan maantienopeuksilla.
- Parempi ajokäyttäytyminen pysäköityjen autojen rivin vieressä kapeilla kaistoilla, mieluummin kuittaaminen ja kaistalla pysyminen kuin tarpeeton kaistanvaihto tai hidastaminen.
- Parannetaan kaistanvaihtomanöövereitä selkä menosuuntaan visuaalisen paikannuksen ja karkean kartan kaistalukujen paremman yhdistämisen avulla.
- Käyttöliittymään on lisätty tekstikatkelmia, jotka kertovat FSD Betan suunnittelemista tulevista manöövereistä. Parannettiin myös ajoneuvon reitillä olevien tulevien hidastusten visualisointia. Sakarat renderöidään vaihtelevalla läpinäkyvyydellä ja nopeudella ilmaisemaan hidastuksen voimakkuutta, ja yhtenäinen viiva näkyy paikoissa, joissa auto pysähtyy.
- Parannettiin kohteiden havaitsemisen muistamista ja tarkkuutta erityisesti vähentämällä puoliperävaunujen sijaintivirhettä 10 %, lisäämällä yli 100 metrin päässä olevien ajoneuvojen havaitsemista 3 % ja tarkkuutta 7 % ja lisäämällä moottoripyörien havaitsemista 5 %. Tämä saavutettiin ottamalla käyttöön ylimääräisiä laatutarkistuksia kahden miljoonan videoleikkeen autolabeloidussa tietokokonaisuudessa.
- Vähennettiin vääriä siirtymiä kohteiden ympärillä leveillä kaistoilla ja risteysten läheisyydessä parantamalla kohteen kinematiikan mallintamista alhaisilla nopeuksilla.
Over-the-Air (OTA) -palautusmenetelmä
Sisältyy kohtaan 2022.45.10
Äskettäisen takaisinkutsun (kampanja #23V085 Yhdysvalloissa ja #2023-063 Kanadassa) mukaisesti Tesla tekee parannuksia seuraaviin käyttäytymismalleihin FSD Betassa:
1. Parannettiin päätöksentekologiikkaa, joka koskee tiettyjen keltaisten valojen läpi ajamista tai pysähtymistä, mallintamalla päätös kompromissikehyksenä, jossa otetaan huomioon seuraavat arviot: pysähtymiseen tarvittava hidastuvuus, risteykseen saapumiseen ja sieltä poistumiseen kuluva aika sekä risteyksen yli kuljettu matka ennen kuin valo vaihtuu punaiseksi. Tämän pitäisi tehdä keltaisten valojen käsittelystä luonnollisempaa ja inhimillisempää.
2. Parannettiin pitkittäishidastuksen ohjausprofiilia stop-merkkiristeyksiin tultaessa, jotta koko manööveri tuntuisi helpommin havaittavalta ja luonnollisemmalta.
3. Teslan nopeuden säätöä tietyille nopeusalueille saavuttaessa on parannettu siten, että nopeusrajoitusmerkkien havaitsemista voidaan valvoa aikaisemmin. Reagoinnin vakuuttavuus hidastettaessa havaittujen nopeusrajoitusmerkkien vuoksi määräytyy nykyisen nopeuden ja sen eron perusteella havaitun merkin osoittamaan nopeuteen. Käyttöliittymässä olevan nopeusrajoituskuvakkeen taakse on lisätty visuaalinen merkkivalo, joka varoittaa kuljettajaa, kun ajoneuvon asetettu nopeus ylittää havaitun nopeusrajoituksen yli 50 prosentilla. FSD Betasta poistettiin myös mahdollisuus absoluuttisen nopeusrajoituksen siirtoon; käytettävissä on nyt vain prosentteihin perustuva siirto.
4. Päivitettiin käyttäytymistä tietyissä tilanteissa, joissa Tesla saattaa siirtyä kääntymiskaistalta jatkamaan suoraa matkaa. Näitä manöövereitä käsitellään nyt kaistanvaihtona, jolloin kääntymisilmaisinta käytetään varoittamaan muita kuljettajia Teslan aikomuksesta.
Kuljettaja on vastuussa ajoneuvon toiminnasta myös silloin, kun FSD Beta on käytössä. Sinun on jatkuvasti valvottava tietä, pidettävä kädet ratissa ja oltava valmis puuttumaan tilanteeseen turvallisuuden ylläpitämiseksi.